
MP4U高精度伺服控制系統(tǒng)
> Three primary use cases:
> MP4Unt configuration: an EtherCAT master controller with up to 8
integrated drives
> MP4Unt configuration with internal EtherCAT bridge: both an
EtherCAT DS402 drive subsystem under any EtherCAT master
controller and an EtherCAT master controller with integrated drives
> MP4Udc: an EtherCAT multi-axis drive subsystem under an ACS
EtherCAT master controller
> High performance and economical type of drives
> drives for nanometer level jitter and following errors
> PWM for less demanding axes
> Wide range of current and voltage
> Current: 3.3/10A to 13.3/40A (cont/peak)
> Voltage: 48Vdc and 96Vdc
> 1.6 kW and 3.2 kW power supply with AC input
> 96Vdc/32A
> 48Vdc/32A or 48Vdc/ 64A
> Both 96Vdc/32A and 48Vdc/32A
> Safe Torque Off (STO) option
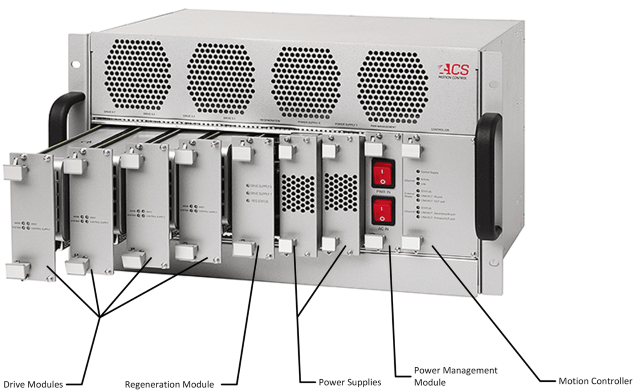
> All connectors are located on the back of the enclosure
> Built-in fans with air flow from the front to the back of the enclosure
> ACS field proven robustness and reliability
> MP4Unt configuration: an EtherCAT master controller with up to 8
integrated drives
> MP4Unt configuration with internal EtherCAT bridge: both an
EtherCAT DS402 drive subsystem under any EtherCAT master
controller and an EtherCAT master controller with integrated drives
> MP4Udc: an EtherCAT multi-axis drive subsystem under an ACS
EtherCAT master controller
> High performance and economical type of drives
> drives for nanometer level jitter and following errors
> PWM for less demanding axes
> Wide range of current and voltage
> Current: 3.3/10A to 13.3/40A (cont/peak)
> Voltage: 48Vdc and 96Vdc
> 1.6 kW and 3.2 kW power supply with AC input
> 96Vdc/32A
> 48Vdc/32A or 48Vdc/ 64A
> Both 96Vdc/32A and 48Vdc/32A
> Safe Torque Off (STO) option
> All connectors are located on the back of the enclosure
> Built-in fans with air flow from the front to the back of the enclosure
> ACS field proven robustness and reliability